ÁREAS DE ATUAÇÃO – Resolver R25
Resolver R25, Principais Aplicações: Óleo e Gás – Automação de Fábricas – Elevadores – Embalagem – Laboratórios – Motores Elétricos – Papel e Celulose – Servomotores – Siderurgia e Mineração
Carcaça robusta com classificação IP65 | Rolamentos espaçados para vida útil até 10 vezes superior à de rolamentos dúplex tradicionais | Resistente a choque de 200 G e vibração de 40 G
Clique Aqui para mais informações sobre Resolvers Dynapar.
Encoders e Resolvers: como escolher a melhor opção?
A cada dia temos cada vez mais opções de dispositivos rotativos de posição e de feedback de velocidade no mercado. O que devo considerar para fazer a melhor escolha? A questão já não é apenas se você deve optar por um encoder ou um resolver. O número de questões pode ser incompreensível. Começando com “Deve ser absoluto ou incremental?”; “Deve ser magnético ou óptico?”; Há outros fabricantes lá fora que fazem capacitivo e indutivo. Eu deveria estar considerando-os bem? Responder a todas estas perguntas é um caminho fácil? Errado. Quando se trata de resolvers, você precisa conhecer tamanho, precisão, tipo de montagem, velocidade e interface elétrica necessários. Para encoders, você precisará saber resolução, precisão, tipo de montagem, saída e conexão.
ENCODERS INCREMENTAIS
Os encoders incrementais contam com um sistema eletrônico externo para interpretar a posição com 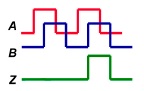 base na contagem dos eventos que ocorreram nesse dispositivo. As saídas para encoders incrementais podem vir na forma de um única onda quadrada (A, em sinais de ondas quadradas (A e B para determinar a direção de rotação ou em ondas quadradas faseados e um índice ou um pulso (marker) por volta (A, B e Z).
base na contagem dos eventos que ocorreram nesse dispositivo. As saídas para encoders incrementais podem vir na forma de um única onda quadrada (A, em sinais de ondas quadradas (A e B para determinar a direção de rotação ou em ondas quadradas faseados e um índice ou um pulso (marker) por volta (A, B e Z).
O conceito de ondas quadradas defasadas para determinar o sentido rotacional é muitas vezes referido como “quadratura”. Os meios para atingir um sinal incrementais são geralmente referidos como tecnologia do encoder. As duas principais categorias de tecnologia são óptica e magnética. Em ambas as tecnologias, o alinhamento de um sensor é executado para proporcionar a compatibilidade de saída.
Na tecnologia óptica, a luz é gerada por um LED e detectada por um sensor em nível de chip. Entre os dois há um disco codificado, tipicamente feito de vidro, metal ou plástico. Em um encoder incremental, o disco codificado é gravado, revestido ou um perfurado (se metal com uma fina grade de linhas semelhantes ao redor da circunferência.
Nos de tipo magnético, há uma roda ou um disco magnético, um sensor magneto-resistivo e um circuito de condicionamento. O disco ou roda é magnetizado com vários polos. O sensor converte a mudança senoidal no campo magnético em um sinal elétrico quando o disco ou roda gira. Esse sinal elétrico é multiplicado, dividido, ou interpolados pelo circuito de condicionamento para produzir a saída de onda quadrada desejável.
Com a facilidade de um circuito eletrônico e o projeto de um software, dispositivos que aceitam entrada de encoder incremental estão amplamente disponíveis. Você pode encontrar drivers, medidores de painel, contadores e cartões de CLP que fazem interface com encoders incrementais.
Leitores ópticos podem ser encontrados em aplicações em ambientes de escritório como copiadoras, e aplicações industriais, como veículos teleguiados (AGVs), encoders magnéticos são normalmente necessários em condições adversas, onde leitores ópticos podem apresentar redução significativa de desempenho. Estas aplicações podem ser pontes rolantes, veículos fora de estrada, e fábricas de papel.
ENCODERS ABSOLUTOS
Encoders absolutos fornecem um meio para saber o ângulo exato da rotação em relação a um dispositivo fixo. Um encoder absoluto usa um padrão binário único que não se repete dentro da volta, dando ao encoder seus atributos absolutos.
O feedback também vai mudar quando a posição de rotação é alterada, mesmo quando a energia é  removida. Quando um conjunto de engrenagens é usado para controlar o número de rotações de um encoder, ele é um encoder multi-turn. Em um absoluto óptico, um disco gira entre o diodo emissor de luz e o sensor, permitindo ou não a passagem de luz entre vários sensores, com base no padrão do disco. Isto, em última análise, é o que proporciona o “on-ou-off” de cada bit do sinal digital a partir do encoder.
removida. Quando um conjunto de engrenagens é usado para controlar o número de rotações de um encoder, ele é um encoder multi-turn. Em um absoluto óptico, um disco gira entre o diodo emissor de luz e o sensor, permitindo ou não a passagem de luz entre vários sensores, com base no padrão do disco. Isto, em última análise, é o que proporciona o “on-ou-off” de cada bit do sinal digital a partir do encoder.
Os encoders absolutos ópticos Dynapar/Hengstler podem fornecer mais de 4 milhões de contagens em uma volta de um eixo à uma precisão de trinta e seis arco-segundo. Existem vários meios de transmissão de posição absoluta. Os primeiros dispositivos de realimentação absolutos transmitiram a sua posição usando dados paralelos.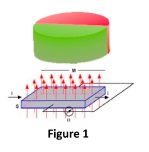
Em dados paralelos, cada dígito binário tem o seu próprio fio que é interpretado por um controle de leitura. Em seguida, há encoders seriais em que a posição absoluta é transmitida em sincronia com um pulso de clock.
SSI ou Synchronous Serial Inferface é o protocolo mais comum de encoders seriais. Encoders BiSS manipulam os pulsos de clock para fornecer comunicação bidirecional. Agora no mercado temos encoders com comunicação Bus. Eles permitem vários encoders conectados em um cabo de transmissão única. DeviceNet, Profibus, Ethercat e Interbus estão entre os protocolos bus mais populares. 
Nos encoders absolutos magnéticos, as informações absolutas podem ser obtidas por um imã rotativo axialmente acima de uma rede de sensores, como mostrado na Figura 1. O sensor é tipicamente um tipo de chip de efeito de Hall ou circuito de sensor magneto-resistivo.
Em termos de ambiente, as mesmas regras seriam seguidas por um absoluto ou incremental. No entanto, o uso de encoders absolutos está crescendo em todo o mundo devido ao aumento da complexidade nos projetos de máquinas, que requerem múltiplos eixos a serem sincronizados e operados com eficiência e segurança. Os encoders incrementais dependem de dispositivos secundários, tais como interruptores de limite, para operar funcionalmente e com uma resposta precisa.
RESOLVERS
Semelhante aos encoders, os resolvers também são dispositivos eletromecânicos que convertem a força  mecânica em um sinal eletrônico. No entanto, ao contrário de um encoder, um resolver transmite um sinal analógico em vez de digital. É essencialmente um transformador rotativo com um enrolamento primário e dois enrolamentos secundários que são defasados em 90 graus mecânicos, como mostrado na Figura 2.
mecânica em um sinal eletrônico. No entanto, ao contrário de um encoder, um resolver transmite um sinal analógico em vez de digital. É essencialmente um transformador rotativo com um enrolamento primário e dois enrolamentos secundários que são defasados em 90 graus mecânicos, como mostrado na Figura 2.
A saída do resolver requer entradas de controle e lógica que possam interpretar sinais analógicos.Uma das especificações em um resolver é o seu número de velocidades. A saída na Figura 3 é a saída de um resolver com uma única saída de velocidade.
O número de velocidades é equivalente ao número de ciclos de amplitude modulada senoidais numa rotação do resolver. Resolvers de múltiplas velocidade são conseguidos aumentando o número de polos 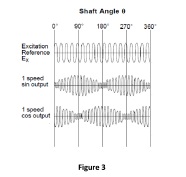 magnéticos no rotor e estator de forma igual. O número máximo de velocidades está limitada ao tamanho do resolver, e é normalmente feito para aumentar a precisão. No entanto, um resolver de única velocidade é essencialmente um dispositivo absoluto single-turn.
magnéticos no rotor e estator de forma igual. O número máximo de velocidades está limitada ao tamanho do resolver, e é normalmente feito para aumentar a precisão. No entanto, um resolver de única velocidade é essencialmente um dispositivo absoluto single-turn.
Ao aumentar as velocidades de um resolver, a informação absoluta é perdida. Se o espaço permitir, a montagem de um resolver de velocidade única sobre um resolver de velocidade múltipla irá fornecer a maior precisão e benefícios absolutos.
A ausência de ambos, óptica e circuitos eletrônicos, permite o uso em ambientes de alta radiação. Os
resolvers têm sido testados e aprovados, mas a saída analógica limita as opções disponíveis. O uso mais popular de resolvers é em motores ca de ímã permanente sem escovas, aplicações militares e aplicações aeroespaciais.
Em resumo, a aplicação deve ser o guia na hora de decidir entre o feedback do resolver ou do encoder. Um sistema eletrônico de controle e ambiente são as duas maiores questões a considerar, quando ambas são respondidas, a escolha se torna clara. A seguir você encontrará especificações que refletem as observações desta literatura.

Comentários