Os encoders de posição são usados para medir posição rotativa de um eixo ou a posição linear de uma carga indiretamente com um encoder rotativo montado no motor ou diretamente com encoder lineares.
Para encoders de posição linear, existem três abordagens básicas para rastrear a posição:
- Medida indireta usando um encoder de posição em um motor rotativo
- Medição indireta usando um encoder linear em um motor linear
- Leitura direta usando um encoder de posição na carga
Como qualquer outro processo, a abordagem mais eficaz para ser adotada em seu projeto é totalmente dependente da configuração, das condições e dos requisitos de desempenho da aplicação.
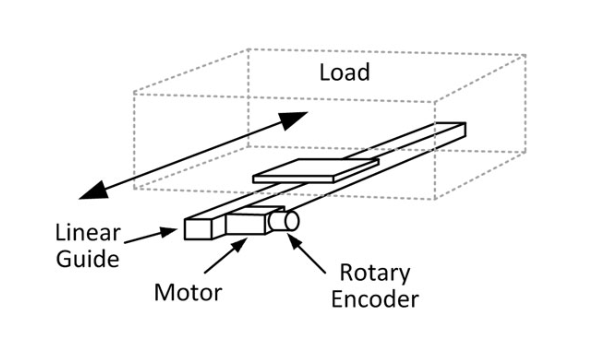
Medição indireta usando um codificador de posição em um motor rotativo
Essa abordagem oferece desempenho moderado, mas é fácil de usar. Um encoder de posição rotativa é instalado no eixo de um motor rotativo para monitorar a posição do eixo. O csensor de posição fornece uma saída correspondente à rotação do eixo, em termos de pulsos de tensão ao usar encoders incrementais ou posição angular absoluta ao usar encoders absolutos . O dispositivo de leitura, seja um controlador, inversor ou contador / monitor, precisa converter esses dados na duração da viagem e, em seguida, adicionar essa duração na posição inicial para determinar a posição final.
A decisão de usar um codificador de posição incremental ou absoluto deve ser orientada pela aplicação.
Essa configuração é fácil de instalar e confiável. Ele suporta feedback direto ao motor. Como o encoder de posição não está diretamente conectado à carga, esse método oferece apenas precisão limitada. As fontes de erro incluem acoplamentos; desalinhamento eixo a eixo; folga na caixa de câmbio; e não linearidades introduzidas por acelerações, variações de temperatura, etc.
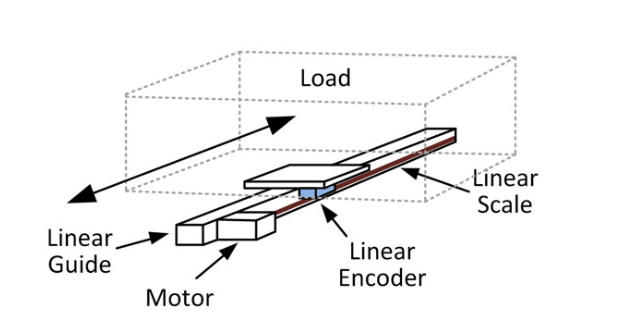
Medição indireta usando um codificador linear em um motor linear
O monitoramento do movimento de uma carga em um motor linear usando um encoder de posição linear oferece uma precisão muito melhor. Um motor linear é essencialmente um motor rotativo desenrolado, por isso gera movimento linear diretamente. Não há necessidade de um atuador mecânico. Isso elimina várias fontes de erro.
Para medir a posição da carga em um motor linear usando um encoder linear, a escala linear precisa ser afixada à parte estacionária do motor, normalmente a trilha magnética ou a superfície que a suporta. O elemento de leitura do codificador é montado na parte móvel do motor, conhecida como forcer.
Mais uma vez, encoders de posição incrementais e absolutos podem ser usados. Este método fornece melhor precisão de posição do que a versão rotativa. No entanto, ele deve ser usado em um ambiente apropriado. A balança precisa ser mantida limpa e em boas condições. Ele precisa ser montado corretamente para que fique bem alinhado. Afinal, possibilidades de pequenos erros existem em qualquer sistema.
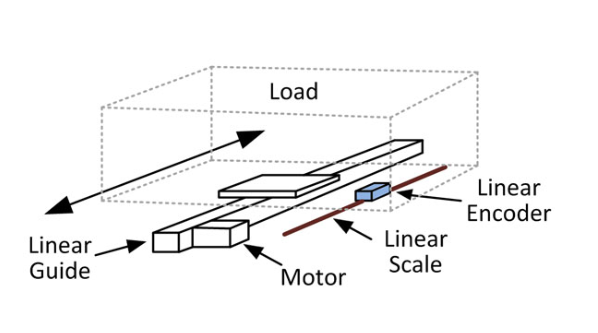
Medir Posição Direta usando um Encoder de Posição na Carga
As aplicações que exigem precisão muito alta devem usar encoders lineares montados na carga. Este método de leitura direta reduz muito o erro de medição. Pode ser usado com motores lineares e rotativos acionando atuadores lineares.
Nesta abordagem, o codificador de posição linear deve ser montado externamente ao motor linear / atuador linear. Como descrito acima, a escala do encoder linear deve ser montada em uma superfície sem movimento e o conjunto do detector deve ser afixado à carga.
Nesse ponto, o encoder se torna a principal fonte de erro para a localização da posição. Dado que os codificadores geralmente superam a maioria dos componentes do sistema, a abordagem direta facilita a precisão e a repetibilidade necessárias para a aplicação.
A técnica é compatível com codificadores incrementais ou absolutos. A compensação por toda essa precisão é um desafio significativamente maior na implementação. A abordagem aumenta o custo e a complexidade e adiciona pontos adicionais de falha, resultando em uma redução na confiabilidade geral do sistema. Como no exemplo anterior, o sistema é mais vulnerável à contaminação. Particularmente no caso de sensores de alto desempenho, isso deve ser considerado.
Para um material mais detalhado, consulte diretamente o site da Dynapar.
Caso tenha alguma dúvida na escolha do Encoder mais apropriado para a sua aplicação. Entre em contato, a equipe da Mokka-Sensors estará a sua disposição!
Comentários