ÁREAS DE ATUAÇÃO – Encoder Incremental Hengstler RI76TD
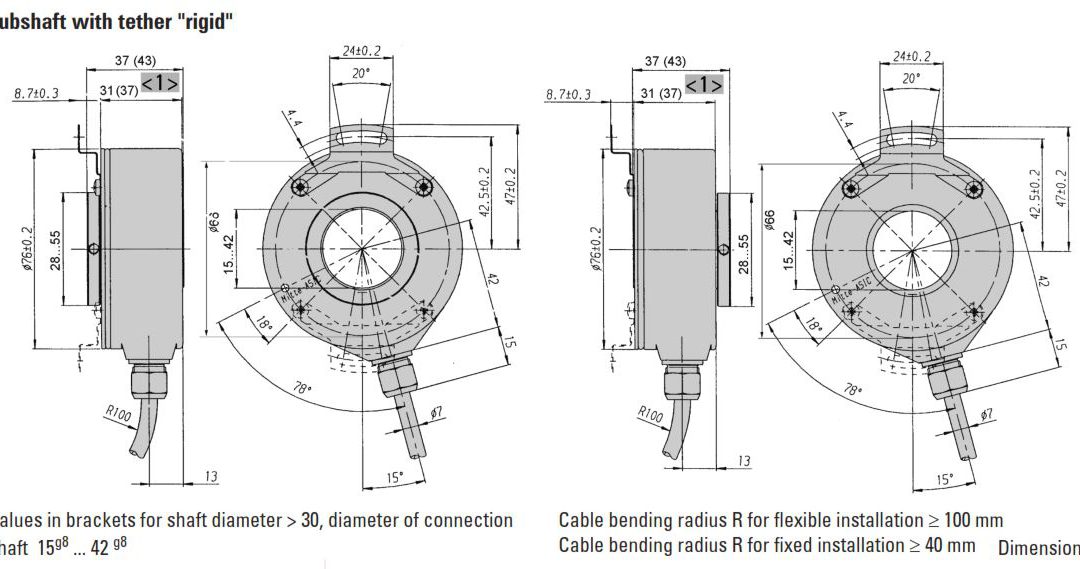
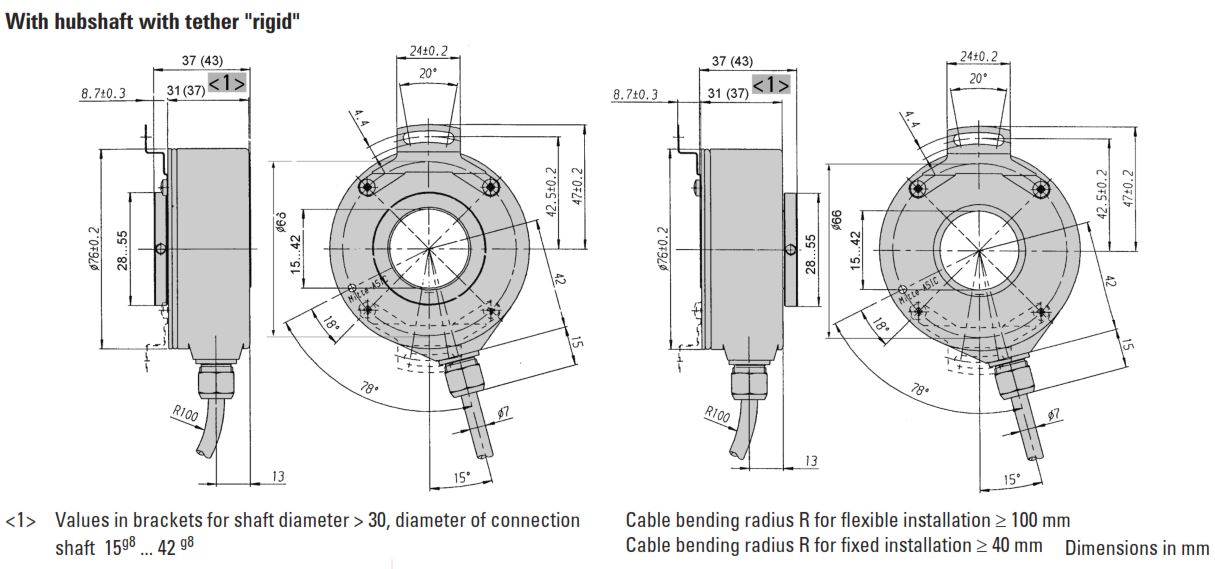
The high-accuracy RI76TD hollow shaft incremental encoder has been specially designed for large shaft diameters up to 42 mm. The housing diameter is only 76 mm, which makes this encoder ideal for use in motors, lifts and printing machines.
RESOLUÇÃO (PPR)
50 / 100 / 128 / 250 / 256 / 300 / 314 / 360 / 500 / 600 / 720 / 900 / 1000 / 1024 / 1250 / 1500 / 2048
/ 2500 / 3072 / 4096 / 5000 / 9000 / 10000
DADOS MECÂNICOS
| Housing diameter | 76 mm | |||||||||||||||
| Shaft diameter | 15 mm / 16 mm / 18 mm / 20 mm / 24 mm / 25 mm / 27 mm / 28 mm / 30 mm / 32 mm / 38 mm / 40 mm (Hub shaft) |
|||||||||||||||
| Flange (Mounting of housing) |
Tether | |||||||||||||||
| Mounting of shaft | Front clamping ring, Rear clamping ring | |||||||||||||||
| Protection class shaft input (EN 60529) |
IP40 or IP64 | |||||||||||||||
| Protection class housing (EN 60529) |
IP50 (IP65 optional) | |||||||||||||||
| Minimum length of mountig shaft clamping ring front | 32 mm with Ø 15 … 30, 35 mm with Ø >30 … 42 | |||||||||||||||
| Mimimum length of mounting shaft clamping ring rear | corresponding to total length of encoder | |||||||||||||||
| Axial endplay of mounting shaft (hubshaft) | With stator coupling A (flexible): ± 2 mm With 1x stator coupling (torsionally rigid): ± 0.5 mm With 2x stator coupling (torsionally rigid): ± 0.3 mm |
|||||||||||||||
| Radial runout of mating shaft (hubshaft) | With stator coupling A (flexible): ± 0.15 mm With 1x stator coupling (torsionally rigid): ± 0.3 mm With 2x stator coupling (torsionally rigid): ± 0.2 mm |
|||||||||||||||
| Max. speed | for Ø 15 … 25 mm at 70 °C and IP64: max. 3600 rpm for Ø >25 … 42 mm bei 70 °C and IP64: max. 1800 rpm for Ø 15 … 42 mm at 70 °C and IP40: max. 6000 rpm for Ø 15 … 42 mm at 100 °C always: max. 1800 rpm |
|||||||||||||||
| Torque | 3 … 10 Ncm (depending on version) | |||||||||||||||
| Moment of inertia | approx. 140 … 420 gcm² (depending on version) | |||||||||||||||
| Vibration resistance (DIN EN 60068-2-6) |
10 g = 100 m/s² (10 … 2000 Hz) | |||||||||||||||
| Shock resistance (DIN EN 60068-2-27) |
100 g = 1000 m/s² (6 ms) | |||||||||||||||
| Operating temperature | -25 °C … +100 °C | |||||||||||||||
| Storage temperature | -25 °C … +100 °C | |||||||||||||||
| Material housing | Aluminum | |||||||||||||||
| Weight | approx. 320 … 580 g (depending on version) | |||||||||||||||
| Connection | Cable, radial | |||||||||||||||
DADOS ELÉTRICOS
| General design | as per DIN EN 61010-1, protection class III, contamina- tion level 2, overvoltage class II | |||||||||||||||
| Supply voltage 1 | RS422 + Sense (T): DC 5 V ±10 % RS422 + Alarm (R): ± 10% DC 5 V or DC 10 – 30 V Push-pull (K), Push-pull antivalent (I): DC 10-30 V |
|||||||||||||||
| Max. current w/o load | 60 mA (DC 5 V), 60 mA (DC 10 V), 35 mA (DC 24 V) | |||||||||||||||
| Max. pulse frequency | RS422: 300 kHz Push-pull: 200 kHz |
|||||||||||||||
| Standard output versions |
RS422 + Alarm (R): A, B, N, A, B, N, Alarm RS422 + Sense (T): A, B, N, A, B, N, Sense Push-pull (K): A, B, N, Alarm Push-pull complementary (I): A, B, N, A, B, N, Alarm |
|||||||||||||||
| Pulse width error | ± max. 25° electrical | |||||||||||||||
| Number of pulses | 1 … 10 000 | |||||||||||||||
| Alarm output | NPN-O.C., max. 5 mA | |||||||||||||||
| Pulse shape | Square wave | |||||||||||||||
| Pulse duty factor | 1:1 | |||||||||||||||
CONEXÃO COM EIXO
Shaft fixing is done through a clamping ring either on the flange or cap side. As a rule, flange side clamping is better for smaller motors as the available shaft stub is correspondingly shorter.
Principais Part Numbers: RI76TD/10000AD.4A15RF , RI76TD/ 1024AD.XA40TX-
Clique Aqui para mais informações sobre Encoders Dynapar.
Perguntas Frequentes
O que é um encoder?
Um encoder é um transdutor que converte um movimento mecânico angular ou linear em uma série de pulsos analógicos ou digitais elétricos. Esses pulsos gerados podem ser usados para determinar velocidade, taxa de aceleração, distância, rotação, posição ou direção.
Quais são os tipos de encoders?
Existem dois tipos de encoders: Encoders Incrementais e Encoders Absolutos.
Consulte também:
– Quais são as características de um Encoder Incremental?
– Quais são as características de um Encoder Absoluto?
Quais são as características de um Encoder Incremental?
Um Encoder Incremental gera uma quantidade pré-determinada de pulsos, para cada unidade de deslocamento. Este tipo de encoder pode ter dois canais (A e B), ou mais com uma defasagem de 90° entre eles, e estes podem servir para indicar a direção do encoder, sendo que quando o canal A chega primeiro, e o B depois, indica uma direção, e quando o B chega primeiro, e o A depois, isso indica direção inversa.
Este tipo de encoder pode ainda contar com um sinal de Marker (index), que emite um pulso positivo a cade 360°. Este sinal pode servir como orientação do posicionamento. Por exemplo, gira-se o eixo do encoder, até a subida do canal de Marker, e para um encoder de 1024 pulsos, ele deverá gerar 1024 sinais, antes da subida do segundo pulso do Marker.
Os encoders incrementais podem ter a saída tanto em quadratura (ondas quadradas) como saída senoidal (com ondas senoidais), as quais o cliente deverá escolher de acordo com sua aplicação.
Quais são as características de um Encoder Absoluto?
Encoders Absolutos são encoders que geram um código binário para cada unidade de deslocamento. Esses encoders mostram esse código binário, no momento em que são ligados, e mantem a posição, mesmo que ocorra uma queda na alimentação.
São muito utilizados quando se necessita precisão no posicionamento. Estão divididos em dois tipos:
– Giro simples (single turn): gera uma sequencia de sinais por giro;
– Giro múltiplo (multi turn): gera múltiplas sequencias de sinais durante um giro.
Como especificar um encoder para minha aplicação?
Para especificar um encoder devemos saber se ele será incremental ou absoluto, quantos PPR (Pulsos Por Rotação) ele terá, se o eixo será sólido, vazado, expandido ou passante, qual é o diâmetro e o comprimento desse eixo, qual é a tensão de alimentação e qual o tipo de cabo ou conector.
Comentários