Encoders Angulares têm a função de medir a variação do ângulo de um processo baseado em um ponto de referência. A saída fornecida para o CLP processada irá condizer diretamente com essa variação angular. São 3 as abordagens para medir ângulos com Encoders:
–Realizar a medida direta do ângulo com um encoder montado no ponto de articulação da carga
–Medição de ângulo indireto com um encoder montado na rotação de acionamento do motor
–Medição de ângulo indireto com um encoder multi-turn montado ao longo da circunferência da carga
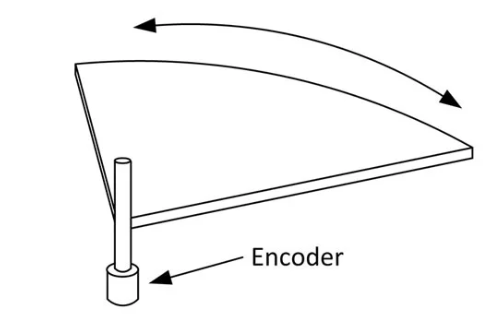
Realizando a Medição Direta do Ângulo com Encoders Angulares:
Para medir o deslocamento angular da carga diretamente, o sensor deve ser montado no ponto de articulação central da carga. À medida que a carga gira, o encoder retransmite o sinal para o dispositivo receptor. Esses dados consistem apenas em pulsos de deslocamento para encoders incrementais ou nas posições absolutas inicial e final para encoders absolutos. Com os dados fornecidos, um CLP / Controlador deve realizar determinada tarefa pré-programada.
Para um encoder incremental, o ângulo α pode ser expresso como:
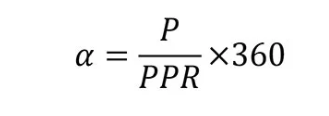
Sendo P o número de pulsos gerados, PPR os pulsos por revolução.
Para um encoder absoluto, o ângulo α é dado por:
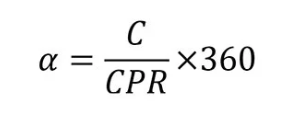
Onde C é igual a contagem – bit inicial e final – e CPR é p número total de contagens por rotação desse encoder.
Medição Indireta de Ângulos com Encoders Angulares no Eixo do Motor
Também é possível medir o deslocamento angular de uma carga monitorando o eixo do motor ou uma roda intermediária. Nesse caso, obtemos melhores resultados girando o eixo do motor um número definido de vezes e correlacionando-o com o deslocamento da carga para gerar um fator de conversão.
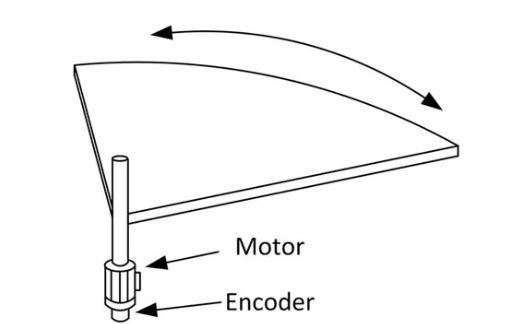
Para essa medição, o fator de conversão deve levar em conta possíveis erros e uma menor precisão no ângulo medido, afinal aqui o encoder tem o feedback direto do MOTOR e não do ângulo da carga em si.
Medição indireta, acompanhando a borda da carga com Encoder Angular.
Em casos gerais, a utilização desta forma de medição é correspondente a aplicações nas quais são inviáveis a utilização das duas outras formas de medições apresentadas anteriormente. Seja por questões elétricas ou mecânicas. Medindo o ângulo através de sua circunferência.
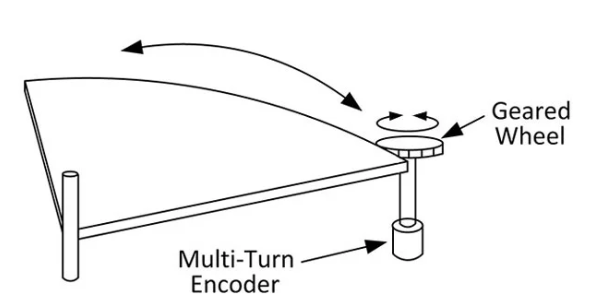
No método circunferencial indireto, uma roldana dentada acoplada a um encoder absoluto multi-turn engata com a circunferência da carga para rastrear seu deslocamento angular.
Por sua vez, um fator de conversão deve ser adotado, pois à medida que a circunferência medida gira, roldana do encoder também rotaciona, sendo esse movimento registrado pelo encoder. A angulação final RF fornecida é:
Sendo RB é o número de contagens na circunferência e N é a taxa de redução das engrenagens no encoder multi-turn.
As principais fontes de erro sob as quais esse processo está submetido se relacionam com questões mecânicas, acoplamentos, eixos descentralizados e etc.
Medir Ângulos com Encoders Incrementais ou Absolutos?
Os incrementais podem registrar apenas o deslocamento de alguma posição inicial definida arbitrariamente que é estabelecida na inicialização. Essa posição inicial, geralmente chamada de índice, cria apenas um pulso ao longo de uma rotação completa do disco de código. Isso permite que o dispositivo que processa o sinal do codificador rastreie o número de voltas completas do disco do codificador a partir da posição inicial. No entanto, o pulso do índice não é exclusivo, portanto, o número de rotações completas contadas geralmente é perdido se o dispositivo estiver desligado e precisar ser realocado na inicialização. A chamada perda de Referencia.
Para os absolutos é gerada uma palavra digital exclusiva para cada posição do disco de código. Os encoders absolutos multi-turn também rastreiam o número total de rotações completas com uma palavra digital. Portanto, não há necessidade de retorno ao local e as informações não são perdidas quando o dispositivo é desligado. No momento em que um codificador de ângulo absoluto é ativado, ele pode relatar exatamente onde está lendo a palavra digital desse ângulo em particular.
Segue abaixo, algumas das principais linhas de encoders angulares da Dynapar / Hengstler disponíveis no mercado:

Para um material mais detalhado, consulte diretamente o site da Dynapar.
Caso tenha alguma dúvida na escolha do encoder mais apropriado para a sua aplicação. Entre em contato, a equipe da Mokka-Sensors estará a sua disposição!
Comentários